ATT.: Professor Flemming Besenbacher
Jeg har læst artikel i Berlingske Tidende
den 12/6 omkring overfladebestemmelse ved en speciel kameraopstilling. På den
baggrund syntes jeg du skulle se mine erfaringen med overflade bestemmelse og
positionsbestemmelse omkring robotopstillinger derfor følgende.
Hvis ikke billeder kan ses er mail her se. http://www.nhsoftware.dk/work/ttg/robottang.htm
MVH
Nhsoftware v/Niels Hansen
Mail: Delphi@c.dk
Robottang:
På det ene gribeplan på tank er en ”ballon”. Når lys ankommer til ballonen kastes lys mod ballon side. Til hver form ballen har er der herefter en unik farvekombination som kamera optager gennem anden lysleder.

Hvis nu et rundt objekt feks. en hård jernstang trækkes hen over ballon som vist se.

stangens position i forhold til tang måles løbende sammen med de digitale værdier fra kamera som lagres i en database.
Når samme forsøgsgang gennemføres med en mindre jernstang som her se.

Lagres værdier fra denne proces i database. Når samme forløb er foretaget med andre objekter og data herfra er lagret i databasen da vil tangen/systemet naturligvis kunne genkende same former og konturer og forløb på et givent objekt som ved registreringen.
Hvis det forudsættes at de objekter som efterfølgende skal genkendes af systemet at de er hårde og derfor bevarer der form.
Hvis alle regresterningsforløb er foretaget ved en parallel forløb med ballonoverflade vil systemet kun der hvor størrelse og position de passer med optagende værdier kunne genkende dette emne med dette forløb se.

men nu vil systemet når det forudsættes at emnet var hårdt kunne lagre nye værdier til efterfølgende genkendelse.
Hvis en teknik som ovenstående skal anvendes og kunne det samme som opbygningen her fra artikel i Berlingske Tidende se.

er jeg overbevist om at det vil kunne realiseres. Opbygningen skal ved at kende forskellige bogstavkombinationer og her under former med videre kunne sammensættes disse og derved afgive en digital 3d kontur af den følte hvilket vil kunne laves.
Det som er udfordringen er evnen til at opbygge databasesystemer som kan udtage delemner af en given datamængde feks. hvis kontur af en given mønt kendes at kunne isolere det sandkorn som måtte befinde sig på overflade af denne mønt udfra de indkommende farve kombinationer og dermed talværdier fra kamera.
Databasesystemets evne til at have sammenligningsdata parat i processen hvor en givne pude eller ballon afgiver data når den presses mod emne er afgørende for succes.
Positionsbestemmelse af robottarme
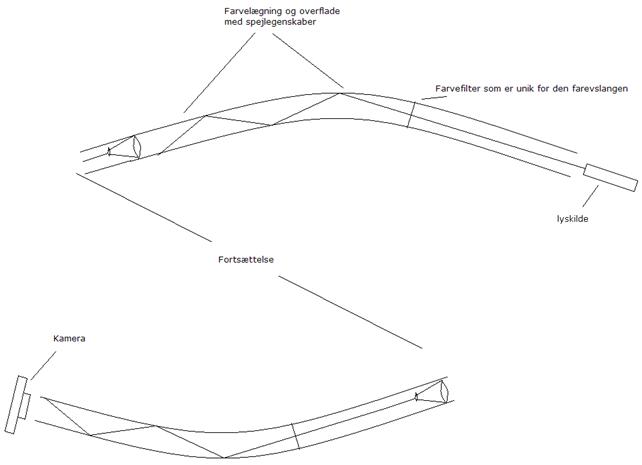
Denne farvebelagte slange med spejlegenskaber så den lysstråle som ankommer til slangeside modtager farven fra slangeside inden den reflekteres dvs. til hver form slangen måtte have eksisterer en unik farvekombination og dermed en unik digitalværdi fra kamera.
Opstillingen var tiltænkt robotopbygninger hvor motor og hydraulik (evt. vand) var placeret i en sokkel hvor på en plast robottarm kunne skiftes hurtigt ved defekt. Til at positionsbestemmelse i robottens arme skulle en plastslange med ovenstående egenskaber indstøbes. Til løbende kalibrering pga. forandringer i plastens egenskaber skulle et kameraer eller trianguleringslaserer via festpunkter på arm kunne bestemme arms fjeder eller afbøjningsegenskaber op mod slanges positionsværdier.
Hvis det sammen med at en frekvensomformer og et hydrauliskforsyningssystem skulle være muligt at udvikle software som tager hånd om frekvensomformerens svagheder omkring bremseforløb da vil man kunne lave nogle meget billige og robuste robotsystemer.