Positionsbestemmelse. Bilag. 1.
For at illustrerer hvad lysleder/prismesystemet for positionsbestemmelse ville (måske) kunne som andre positionssystemer på markedet i dag ikke ville kunne, derfor følgende opbygningseksempel til illustration.
Hvis ventilopbygningen omkring en tandhjulspumpe Se. bilag 4. skulle vise sig mulig kunne følgende flerleddet robotopbygning være mulig. Se. fig. 1.
Fig. 1.

Her i tværsnit

Robotopbygningen kan nu med flere led arbejde som en blækspruttearm når der til stadighed ledes olie til de parvis overfor hinanden stående oliebælge fra ventil/pumpeopbygning.
Da armens konstruktion i sig selv har fjederegenskaber og da bælgenes også har det og da bælgenes og herunder også den plaststøbte arm vil ændre karakteristik over tid omkring belastning vil den til ledte oliemængde ikke nødvendigvis stå i forhold til et givent leds afbøjning og dermed en mulighed ved at sammenhold den samlede til ledte oliemængde til alle bælge for herefter at kunne fastslå robottens position i arbejdsrummet. Hvis dette skal være muligt kræves et meget præcist positionsbestemmelsessystem.
Hvis et system med modstandsafhængige målelinealer kunne konstrueres vil det for de første blive meget bekosteligt og for at skulle kunne bestemme et leds præcise stilling vil dette betinge to målelinealer pr. led. Men da nylon/plastarmene over tid og ved forskellige belastninger vil have forskellige afbøjninger til forskellige kraftpåvirkninger vil et system med målelinealer ikke være anvendelig i praksis.
En opbygning omkring en lyskilde som denne vil være mulig se. fig.
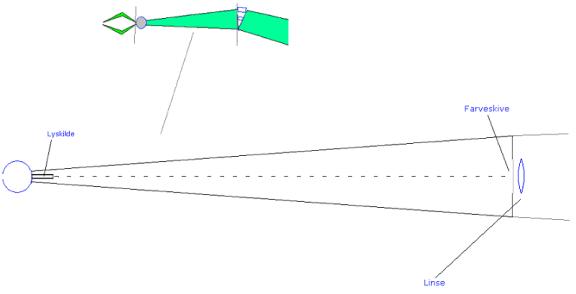
Farveskiven se. Fig.

er konstrueret sådan at hvis lysstrålen den rammer centrum passer lyset uhindret. Hvis robottarmen vrides eller bøjes vil lysstrålen ramme væk fra centrum. Det glas eller gennemsigtige plast er svagt farvebelagt med en unik farve til hver position på glasoverfladen, dette har herefter den betydning at der til hver bøjning af robottens arm er en lysstråle med tilhørende farve, som herefter centreres i linse se. fig. og igen i spredelinse afrettes inden indløb i ”geleballon”

efter passage gennem gelebold koncentreres lys inden parallelisering af sprede linse aom her se. fig.

og når et led på robotten bøjes som her se. fig.

Efter passage af sidste spredelinse er lysstrålen herefter samlet og i centrum af robottarm og vil herefter ramme centrum af næste farveskive i næste led ned gennem robottens arme og hvis ikke dette led er bøjet/vredet vil lysstrålen ramme i centrum her.
Geleballonen skal have den egenskab at den påvirker eller farver det indtrængende lys. Hvis det er muligt at lave enten en geleballon, et spejlsystem eller prismesystem som har den egenskab at det til en given stilling i robottens led laves en unik farvekombination, vil opbygningsprincippet kunne virke.
I analog til lysleder teknologien, hvor datakanaler opdeles i dele af lysespektret, må det her være muligt at et led i robotten, farve lægger den ankommende lys sådan at det i robottens rod via kamera er muligt at udskille netop det lys og den farvelægning som opstod i robottens led, selv når lyset ned gennem robottens arme til stadighed ændre farvesammensætning pga. af farvepåvirkning i disse led som følge af robottens arbejdsstillinger.
Herefter skal hele robottens støbes i plast hvor prismer, linser, led og bælge mm indlægges i plaststøbeform for produktion af færdig robot i en støbe proces.